
Research Profile
Francesco Argenziano
PhD student in Artificial Intelligence and Robotics at Sapienza University of Rome, focused on scene understanding, 3D scene graphs, and task planning.
Read the full bio



News
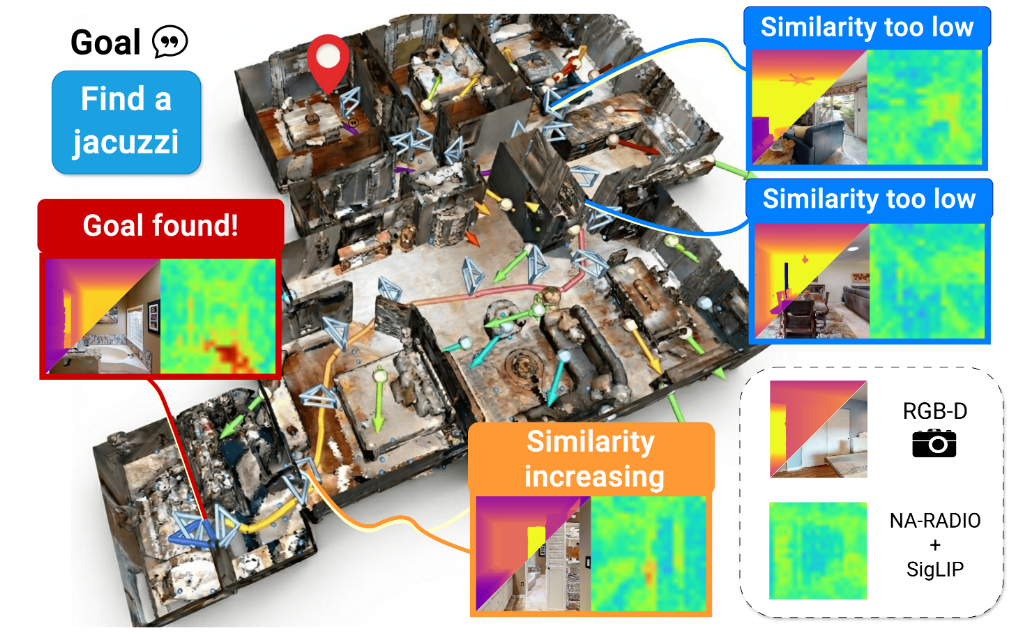
- Our new preprint "R2F: Repurposing Ray Frontiers for LLM-free Object Navigation" is available on arXiv 🚀!
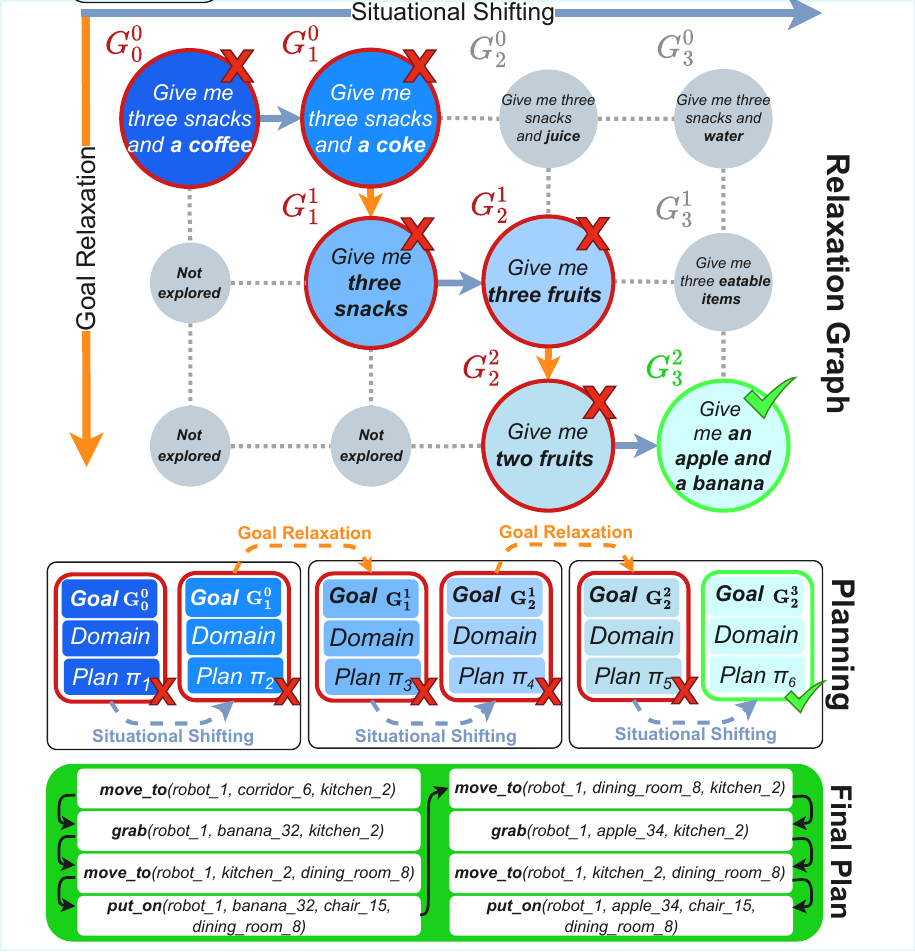
- Our paper "Context Matters! Relaxing Goals with LLMs for Feasible 3D Scene Planning" has been accepted to ICRA 2026 🎉!
- Our paper "LOST-3DSG: Lightweight Open-Vocabulary 3D Scene Graphs with Semantic Tracking in Dynamic Environments" has been accepted to the WACV 2026 SG4SI workshop 🎉!
- Our paper "Dynamic Objects Relocalization in Changing Environments with Flow Matching" got nominated as Best Paper Finalist at the Perception and Planning for Mobile Manipulation in Changing Environments Workshop 🏆!
- In Hangzhou 🇨🇳 for IROS 2025 🧳!
- Our paper "Defining and Monitoring Complex Robot Activities via LLMs and Symbolic Reasoning" to ICTAI 2025 🎉!
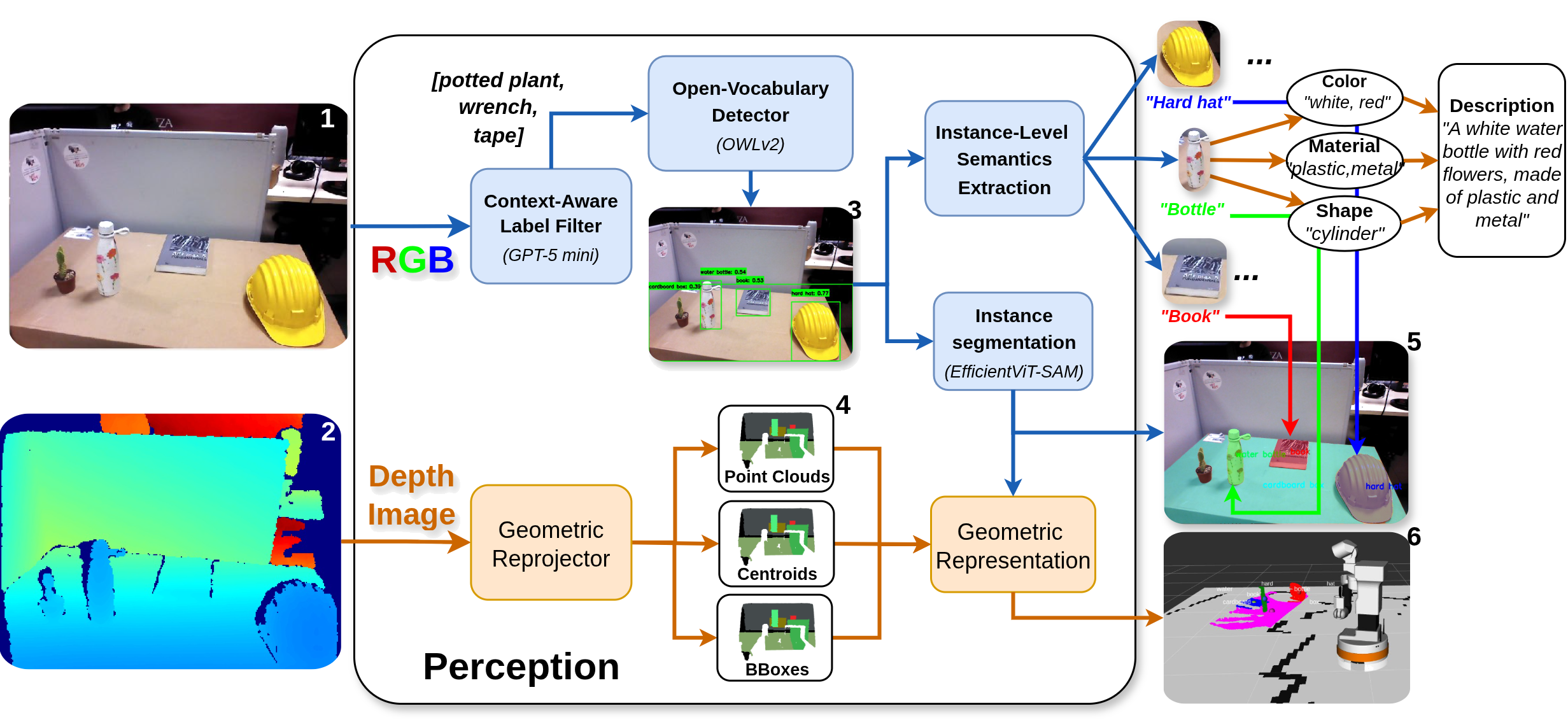
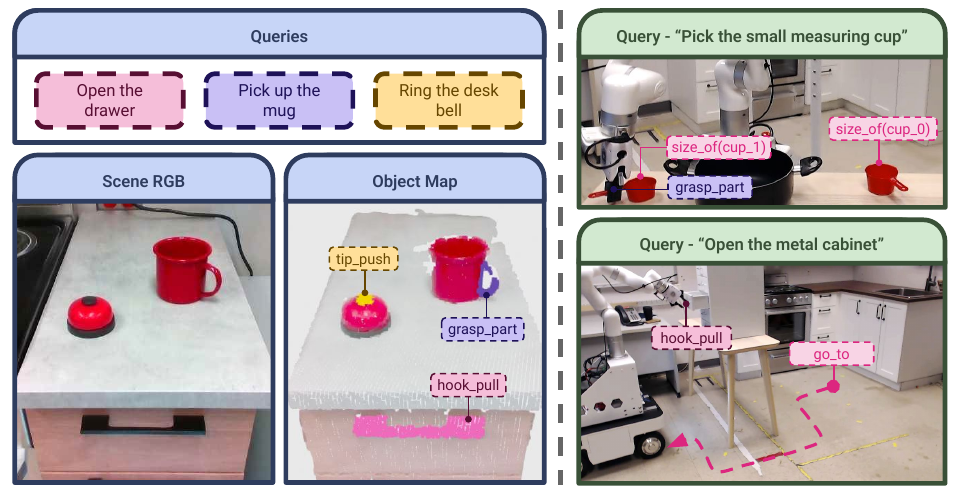
- Our paper "Object-Centric Agentic Robot Policies" has been accepted to the SPACE in Vision, Language, and Embodied AI Workshop at NeurIPS 2025 🎉!
- Our paper "Dynamic Objects Relocalization in Changing Environments with Flow Matching" has been accepted to the Perception and Planning for Mobile Manipulation in Changing Environments Workshop at IROS 2025 🎉!
- Ended my Visiting PhD period ✅!
- Started my Visiting PhD period at Mila - Quebec AI Institute in Montreal to work with Prof. Liam Paull 🎓!
- In Santiago de Compostela 🇪🇸 for ECAI 2024 🧳!
- In Abu Dhabi 🇦🇪 for IROS 2024 🧳!
- Attending the MRS 2024 Summer School 📚 in Prague 🇨🇿!
- In Eindhoven 🇳🇱 for RoboCup 2024 ⚽!
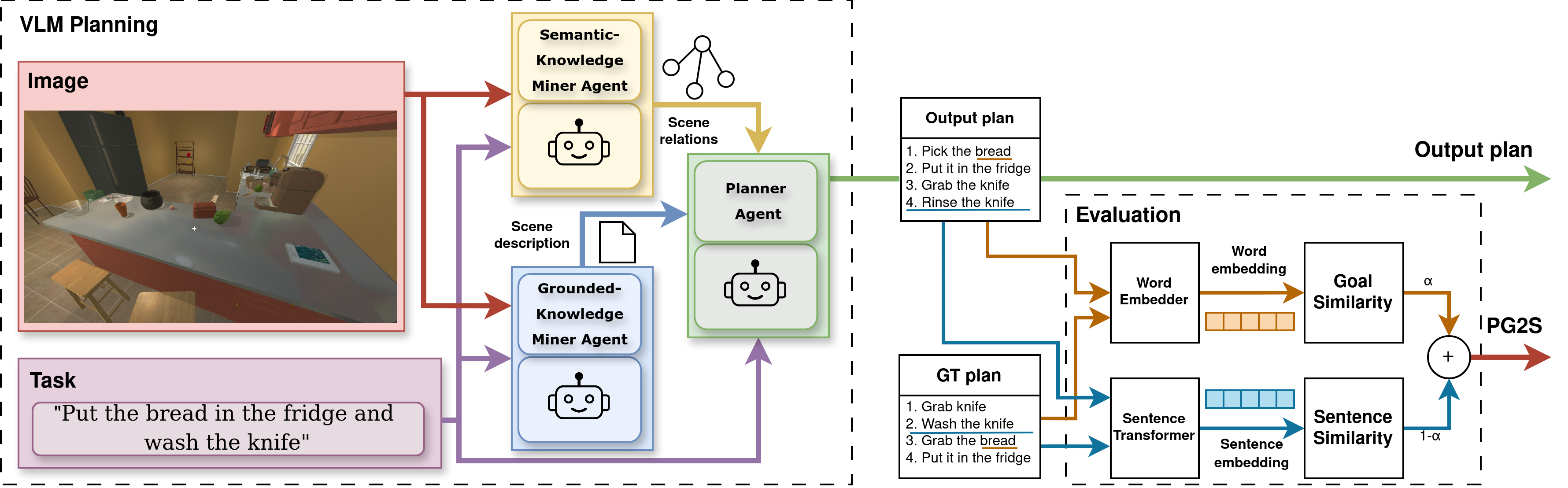
- Our papers "Neural reward machines" and "Multi-Agent Planning Using Visual Language Models" have been accepted to ECAI 2024 🎉!
- Our paper "EMPOWER: embodied multi-role open-vocabulary planning with online grounding and execution" has been accepted to IROS 2024 🎉!
- Honored to have received the award of top 2% of Graduate Students in Sapienza for the year 2021/2022 🏆!
- In Daegu 🇰🇷 for RSS 2023!
- Attending the ACDL 2023 Summer School 📚 in Grosseto 🇮🇹!
- Our paper "Enhancing Graph Representation of the Environment through Local and Cloud Computation" has been accepted to the Robot Representations for Scene Understanding, Reasoning and Planning Workshop at RSS 2023 🎉!
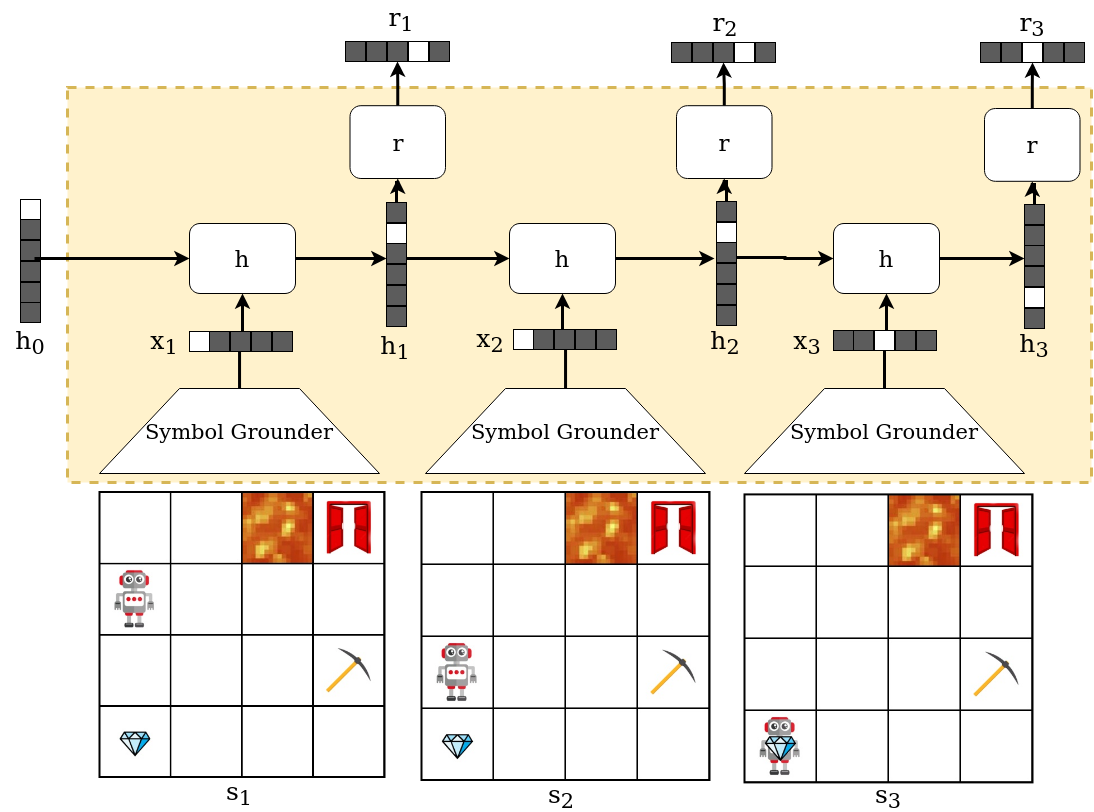
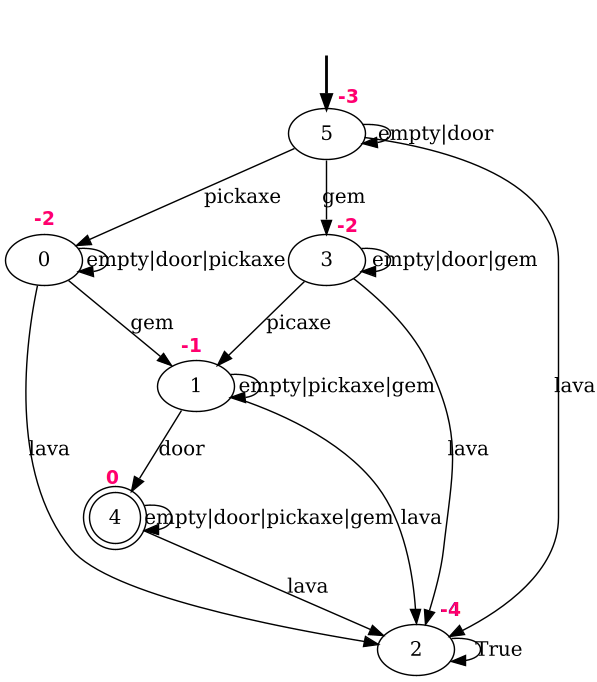
- Our paper "Visual reward machines" has been accepted to NeSy 2023 🎉!
- In Udine 🇮🇹 for AIxIA 2022 🧳!
- Our paper "Knowledge acquisition and completion for long-term human-robot interactions using knowledge graph embedding" has been accepted to AIxIA 2022 🎉!
- Start of my PhD journey 🎓!
Publications
Object-Centric Agentic Robot Policies
Poster PresentationWorkshop on Space in Vision, Language, and Embodied AI @ Annual Conference on Neural Information Processing Systems (NeurIPS), 2025
Enhancing Graph Representation of the Environment through Local and Cloud Computation
Workshop on Robot Representations for Scene Understanding, Reasoning and Planning @ Robotics: Science and Systems (RSS), 2023
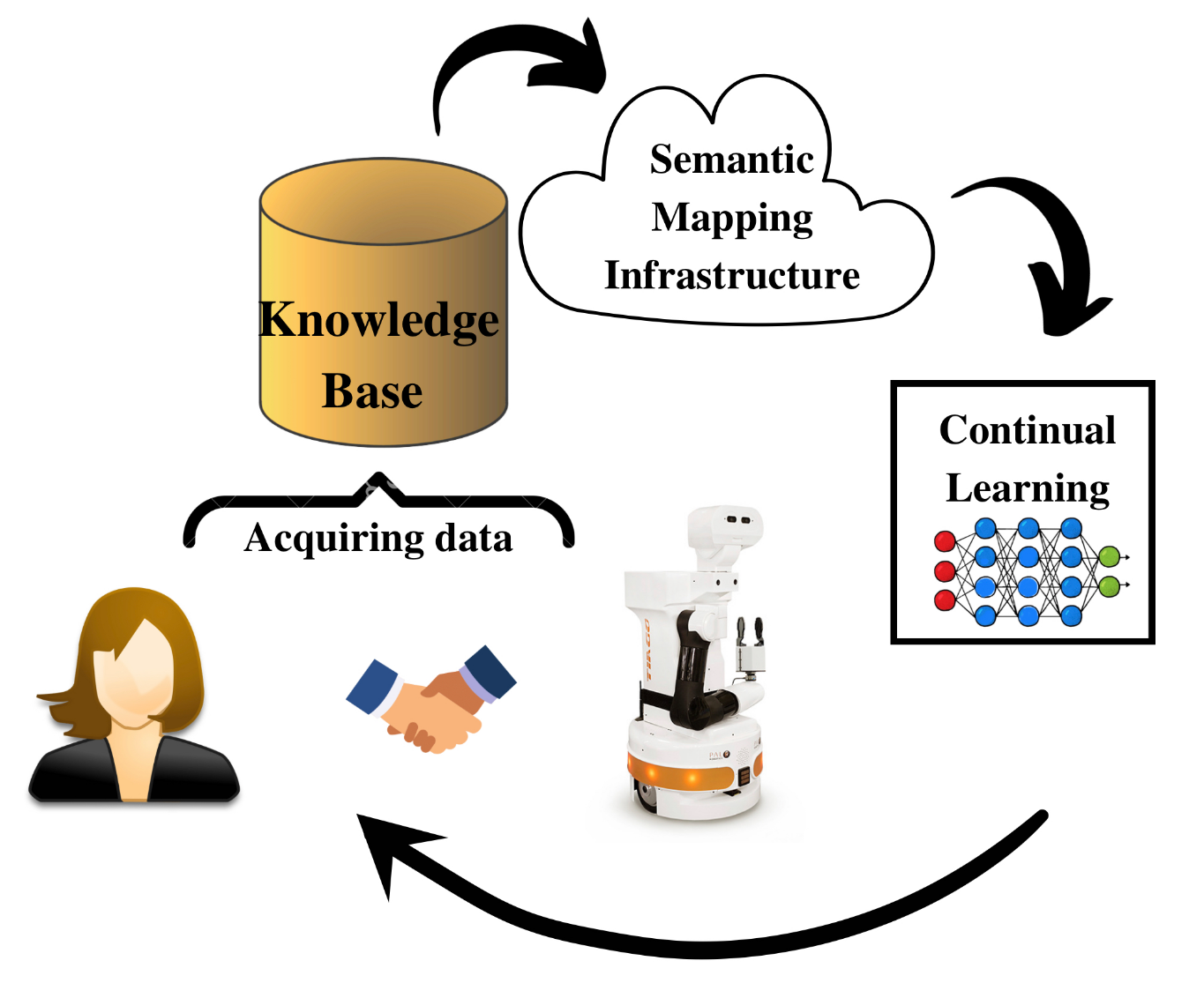
Knowledge acquisition and completion for long-term human-robot interactions using knowledge graph embedding
Oral PresentationInternational Conference of the Italian Association for Artificial Intelligence (AIxIA), 2022